
工程科學及海洋工程系郭振華教授及水下載具實驗室同學邱奕倫、陳漢穎、唐泰清、張凱閔、郭倍豊及黃盛煒參加 2014 年 8 月 30~31 日於日本最具規模的日本海洋開發機構 (JAMSTEC) 舉辦之 2014 年水中機器人競賽,以水下機器人 Iron Fish 完美的滿分表現擊敗包含東京大學在內的 10 所大學與研究機構所研發之水中機器人,榮獲第 1 名。這也是臺大團隊繼 2012 年奪得該競賽冠軍後,再度封王。本校的水下載具實驗室經歷 20 年持續研發無人潛水器系統設計以及操作技術,近年來數次參加國外的水下機器人競賽獲獎,證明臺灣在無人水下載具的研發能力已達世界水準,也已具有製作先進水下機器人系統的工藝。
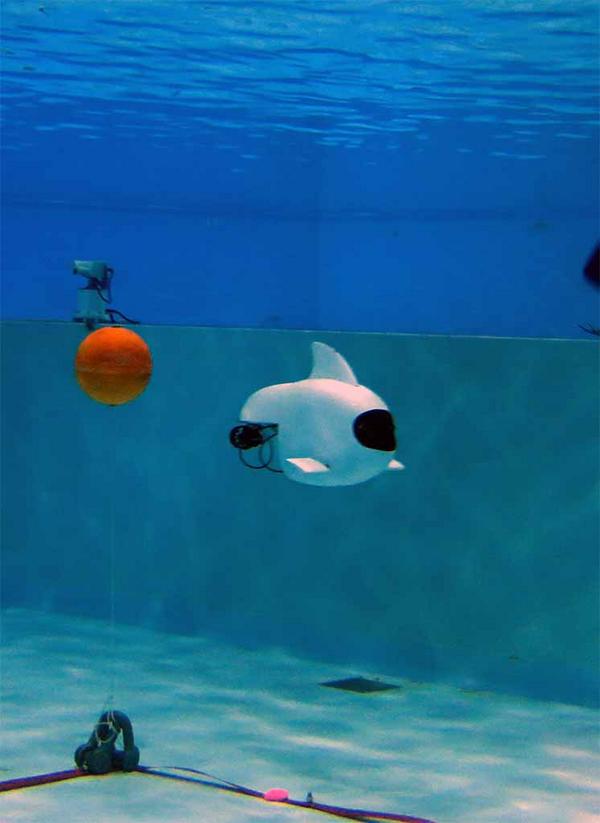
Iron Fish 為工程科學及海洋工程系與國立海洋科技博物館共同開發的水下機器人,目的在使博物館參觀民眾從推進、操縱控制、以及訊號處理技術等水下工程技術,瞭解無人潛水器的設計與運動原理。她的身長為 90 公分,重約 20 公斤。機身是純白色流線造型,機腹中藏有操縱電腦、電池、通訊元件等,深度及方向的測量分別由水壓計、電子羅盤做即時迴授控制。前緣的雙眼攝影機使用立體視覺測量身體與環境特徵的距離。身側兩邊各有兩具動壓量測壓電裝置,以周圍壓力的變動估測與水缸距離,避免碰撞。鋰聚合物電池則可支持 6 小時的持續迴游。由於體內不具浮力調節的機構,其游泳的機制與鯊魚相似,須不停地游動,並使用胸鰭的升阻力調節深度。機尾螺旋槳經由旋轉軸附著於支架上,由馬達帶動皮帶拉動螺旋槳使其左右擺動,用來做前進、後退和水平旋轉。身前兩側有一對胸鰭,用來控制深度。Iron Fish有一個形狀類似鯊魚的背鰭,內有無線網路天線及光感應器。機器人上浮後,可用無線網路連接到內部電腦,或是在接近水面時,以 LED 燈對著機器人快速閃滅來更新控制程式。Iron Fish 的最大前進速率為 1 公尺 / 秒,可在高速下原地迴轉(甩尾),以及急速升降。高速迴旋及下潛的技術是本次比賽奪冠的關鍵技術。